
BUAA-CO课程project3,用logisim实现单周期的CPU
p3_log
整体结构
- 两个mealy机 -> 单周期CPU
- 控制器生成真值表
- 抽象和模块化
- 控制器打表
- MIPS测试,设计数据
- RAM与ROM的区别
设计过程
- CPU分为两个部分,数据通路(Datapath)+控制器(control)
数据通路
- 一个MIPS数据通路又可以抽象为五步:取指令(IF),译码(ID),执行(EX),访存(MEM),回写(WB)
- 相应的应该有PC、NPC、IM、RF、ALU、DM、Controller这几个大的模块,以及在实现的过程中会存在的MUX、EXT、Splitter这些小的模块(系统与子系统的模块)
- 数据通路是连接方式的组合,介于我们需要实现指令条数,我们通过这些指令的RTL描述,倒推出这条指令所需要的功能部件,从而建立起部件之间的连接关系,以及控制信号的取值。然后把这些连接关系填入数据通路的表中,填入每一个端口所需要的输入。
- 把所有的指令分析完后,归并每个端口的输入信号,信号来源唯一的端口可以直接连接,但多输入的情况我们需要MUX+Controller的实现。
- 得到最后的数据通路图后,我们很容易能构造出数据通路。
控制器设计
- 控制器的设计过程,我们理解为通过opcode和function识别指令+输出相应的控制信号,这两步可以进一步抽象为和逻辑和或逻辑。
- 我们把表给列出来(其实这也是一种真值表)。
- 创建好以后,连线就行
具体实现
- 确定所需实现的指令:addu,subu,ori,lw,sw,beq,jal,jr(MIPS-C0),add,sub,xor,jalr,nop,sll/sllv,lui,slt。
- 尽量每一种指令都来一下:
- R型:
- 计算指令:add,sub,and, or
- 移位指令:sll,sra,sllv
- 置位指令:slt,sltu
- 跳转指令:jr,jalr
- 系统调用:syscall
- I型:
- 计算指令:addi,ori,lui
- 置位指令:slti,sltiu
- 分支指令:beq,bne,bgtz
- 访存指令:lw,sw,lh,sh,lhu,lb,sb,lbu
- J型:
- 跳转指令:j,jal
- R型:
- 把每个模块组装好,设计好端口
打表连接
在端口的命名中我们采取的一些命名缩写,它的意义是
| 命名 | 意义 | 备注 |
|---|---|---|
| WD | write data | |
| RD | read data | |
| A | address | |
| WR | write reg | |
| WE | write enable |
PC/NPC实现
- PC用寄存器实现
- NPC先实现一个简单的+4功能
后续跳转指令加入时再看
beq:在ALU的地方返回一个rs=rt的结果到NPC,把imm16传到NPC,再传个控制器信号,是beq就跳
- jal:在这里我们的控制信号就要多增加,而且不仅要计算PC+4+imm26的值,我们还需要计算PC+4的值,写入31号$sp寄存器
- j:与jal的区别仅在于,不用回写
- jr:PC <- GPR[rs],需要读入rs寄存器的值
| 信号名 | 方向 | 描述 | 备注 |
|---|---|---|---|
| PC[31:0] | I | 当前位置 | |
| imm[26] | I | 26位立即数 | beq是imm16,jal是add26,可以覆盖 |
| ra[31:0] | I | jr需要的32位返回地址 | |
| BeqYes? | I | rs,rt相等的标志 | NPCOp=001起作用 |
| NPCOp[2:0] | I | NPC功能选择: 000: 顺序地址 001: beq 010: j 011: jal 100: jr |
|
| NPC[31:0] | O | 输出接下来的PC | |
| PC4[31:0] | O | PC+4 |
IM实现
- IM没有写入的要求,用ROM即可,指令为32位,地址位宽可以选取8(即256条指令)
InstructionSplitter
- 在32位的机器码中根据MIPS指令的类型我们需要得到opcode、rs、rt、rd、shamt、funt、imm16、address,在RIJ型的指令中分别会用到,但是我们并不需要判断指令类型给出相应的输出。我们把这些都给输出,需要什么是后续元件与Controller的事。
RF实现
- 这里在p0已经写过了,就直接CV了,但是注意端口的命名可以改一下。
| 信号名 | 方向 | 描述 | 备注 |
|---|---|---|---|
| clk | I | 时钟信号 | |
| clr | I | 异步复位 | |
| WE | I | 写使能,为1时可以写入 | |
| A1[4:0] | I | 指定32各寄存器中的一个,将值读入RD1 | |
| A2[4:0] | I | 指定32各寄存器中的一个,将值读入RD2 | |
| A3[4:0] | I | 指定32各寄存器中的一个,作为WD值的写入对象 | |
| WD[31:0] | I | 在WE为1,将内容写入A3指定的寄存器 | |
| RD1[31:0] | O | 输出A1指定的寄存器的值 | |
| RD2[31:0] | O | 输出A2指定的寄存器的值 |
ALU(重点!)
在最后加一个MUX输出
addu:直接用加法器
- subu:直接用减法器
- slt:比较器
- ori:有i的都可以按照这个思路来,在RD2与imm16(Zero_ext32)之间加一个MUX,剩下交给控制器
- lw:这里我们需要EXT来实现立即数的符号位拓展,而在ori指令中有非符号位拓展,把他们集成起来做一个EXT模块,剩下交给控制器去决定,R[rt] <- MEM[R[rs]+sign_ext(imm16)],所以rt与rd到A3加一个MUX
- sw:MEM[R[rs]+sign_ext(imm16)] <- R[rt],RD2接到DMWD
- 考虑到跳转指令需要对NPC模块进行改装,beq、j、jal、jr指令的实现就放到PC/NPC实现里了
- 下面是不同的ALUOp代表的功能
| ALUOp | 功能 | 备注 |
|---|---|---|
| 0000 | addu | |
| 0001 | subu | |
| 0010 | ori | |
| 0011 | slt | |
| 0100 | lw | |
| 0101 | sw |
EXT
| 信号名 | 方向 | 描述 | 备注 |
|---|---|---|---|
| ExtOp | I | 选择拓展方式: 0: 0拓展 1: 符号位拓展 |
|
| imm16 | I | 输入的16位立即数 | |
| imm32 | O | 输出的32位立即数 |
DM的实现
- 用一个可写入的RAM来实现
- 用位拓展器把传入的32位值变为8位
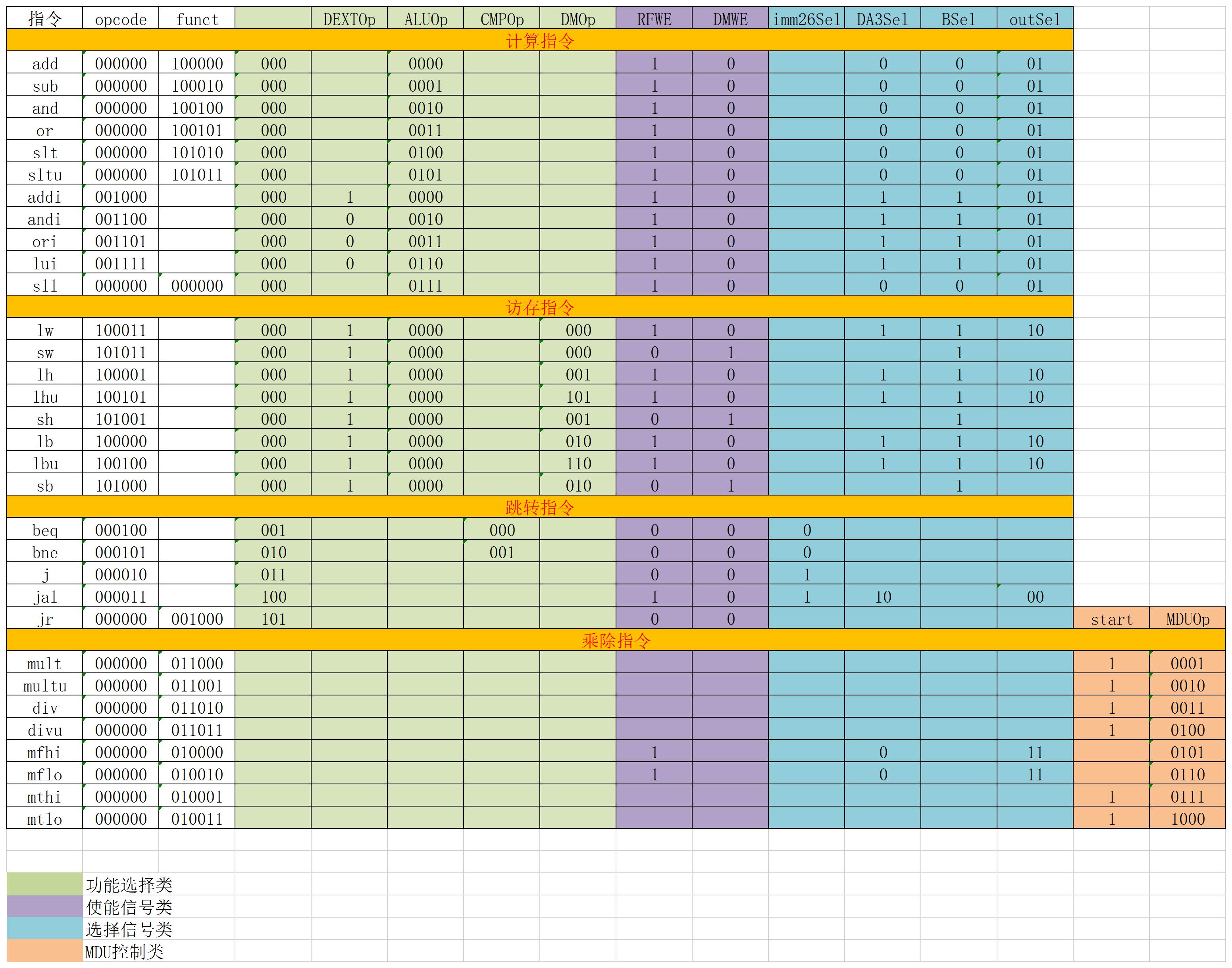
Controller
- 可以分为两个部分,一个是识别器,一个是信号器
- 根据后面的信号表与和或逻辑来搭建
- 注意合理CV,不然会很难受
- 注意测试
- 问题:nop不需要控制为啥,因为nop的时候NPCOp=000,几个WE都是0,写不进东西,所以不需要控制
自此,框架已经搭好,现在开始做打表连接
数据通路表及控制信号表
- 下面根据RTL描述写出数据通路表
- 每一个指令需要将什么端口连接,指令级数据通路与控制器建模,先忽略控制信号的端口
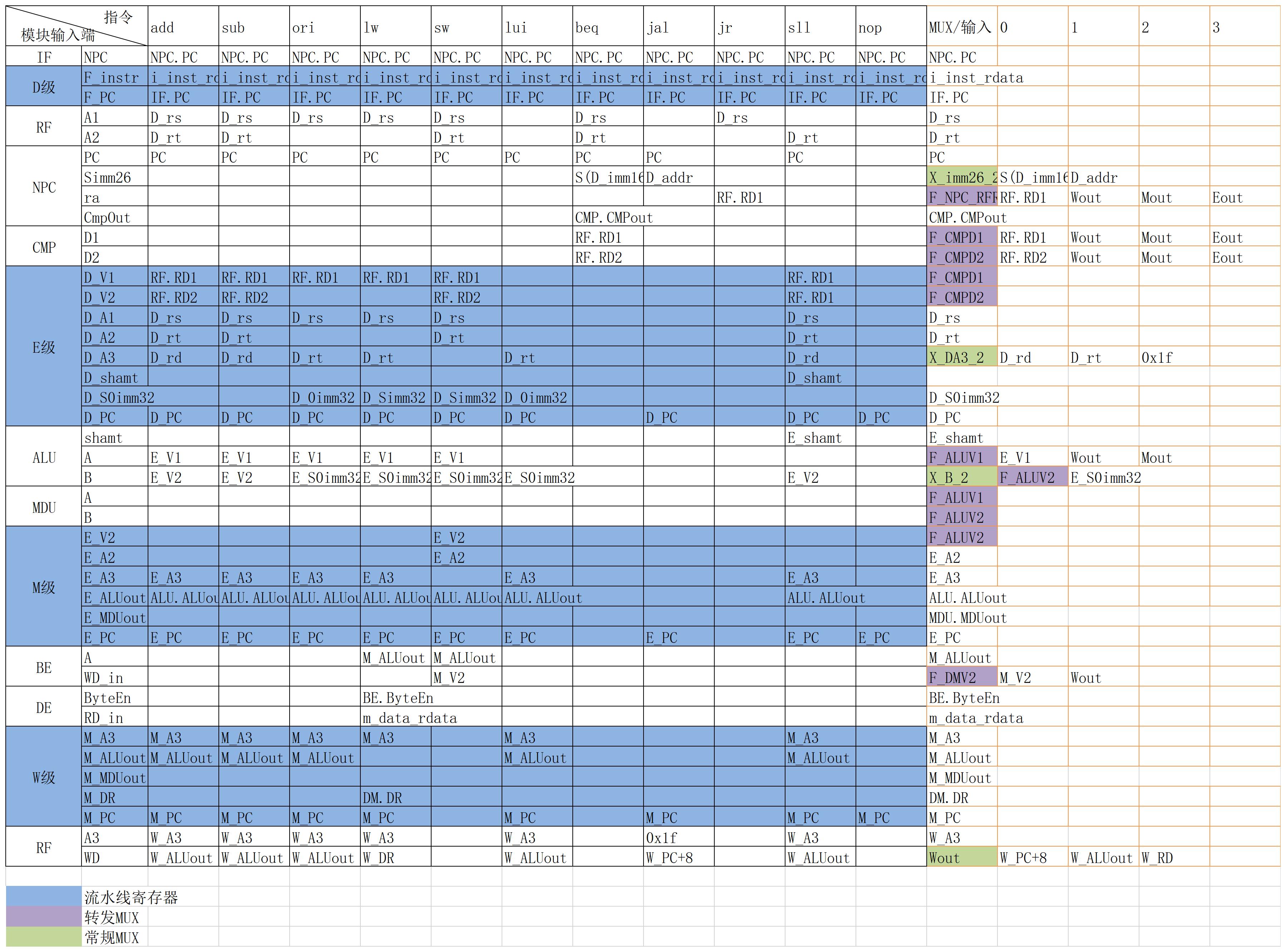
- 相应的在分析每条指令的通路的时候可以把控制信号的取值记下来,暂时不包含MUX的控制
- 所以数据通路连接的总合计为

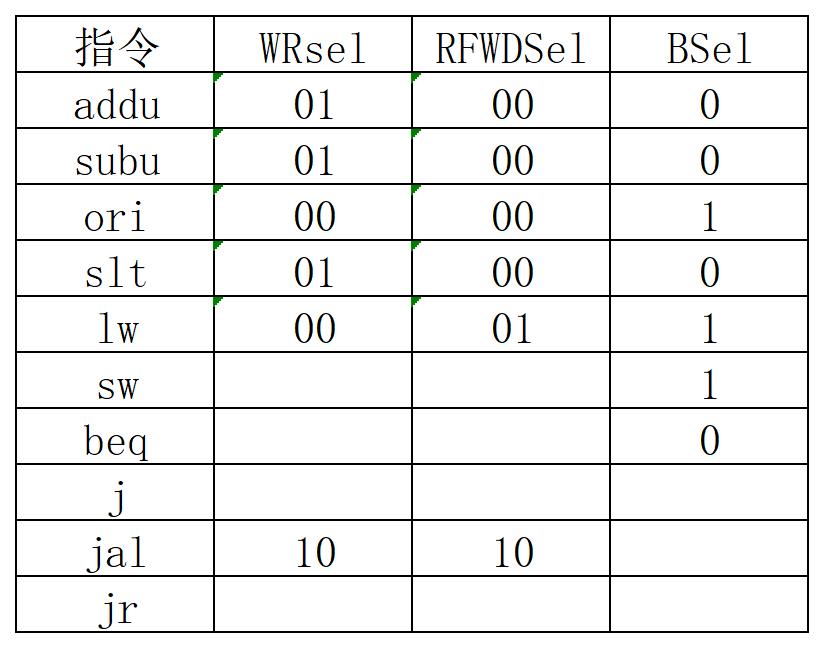
- 在根据数据通路表中的多输入端口,把MUX的Sel信号写入控制信号表
debug
- ROM的寻址方式
- 加入指令lui
- 在数据通路连接表与信号控制表里加入它,然后把该连的线连起来
- 按照控制表打控制器
- 发现一个ori在mars里调用了ori、lui、or
- 但是or除了ALUOp不同以外其余都相同
- add,sub
- DM写入地址输出
- imm32,address移位但ra不移,所以对应到p3的处理办法,ra应该移位
- beq的imm16要符号位拓展(p4的时候才发现这个bug,可见测试数据还是很弱的,需要自己造数据)
测试
- 每条指令功能都测试一下
- 每条指令考虑正负等等
- 用disassembler的工具进行机械码转汇编语言
- 转换注意:b -> j
- neg -> sub
- CPU的每一步对应着MARS调试的每一步
- jr指令可以跳到所有寄存器的储存值,注意!
后续增量开发
- 思考是RIJ哪种指令,思考需不需要跳转
- R型I型对应不同的WRSel
- 跳转要改变NPCOp和NPC接口
- 写对应的控制信号
- 下面由于特殊性,加上lh,lb,sh,sb, sll指令
- 对于lh,sh,lb,sb,lbu,lhu指令,下面以lb,sb,lbu为例
- 改版DM,增加DMOp2:0
- store操作:通过out与WD的7:0拼起来读入,根据A决定
- load操作:只输出out的8位(根据A来决定),注意拓展
- 其余模块都与sw,lw一致
- sll指令比较的特殊,需要加上ASel(为1时选择shamt)
- Controller指令的顺序改进
思考题
- 上面我们介绍了通过 FSM 理解单周期 CPU 的基本方法。请大家指出单周期 CPU 所用到的模块中,哪些发挥状态存储功能,哪些发挥状态转移功能。
- 状态存储:IM,RF,DM
- 状态转移:NPC,ALU
- 现在我们的模块中 IM 使用 ROM, DM 使用 RAM, GRF 使用 Register,这种做法合理吗? 请给出分析,若有改进意见也请一并给出。
- 正确的,合理的,无可挑剔的
- 在上述提示的模块之外,你是否在实际实现时设计了其他的模块?如果是的话,请给出介绍和设计的思路。
- 我把Controller分为了两个部分,一个是识别器,一个是信号发送器,主要考虑是可以在main电路中调试的时候看到当前执行的指令。
- 事实上,实现 nop 空指令,我们并不需要将它加入控制信号真值表,为什么?
- 因为nop的时候NPCOp=000,没有跳转,而且几个WE使能是0,写不进东西,所以不需要控制
- 而且我写了sll,所以nop就对应着移0位的sll,等同于没有修改。
- 上文提到,MARS 不能导出 PC 与 DM 起始地址均为 0 的机器码。实际上,可以避免手工修改的麻烦。请查阅相关资料进行了解,并阐释为了解决这个问题,你最终采用的方法。
- 可以把其中一个起始地址先设为0,然后另一个可以通过写程序实现判断与修改。
- 阅读 Pre 的 “MIPS 指令集及汇编语言” 一节中给出的测试样例,评价其强度(可从各个指令的覆盖情况,单一指令各种行为的覆盖情况等方面分析),并指出具体的不足之处。
- 有些寄存器没有用到,有些负数的特殊情况没有涉及(比如beq的负数情况),跳转的指令没有设计
